3GPP Delivery robots
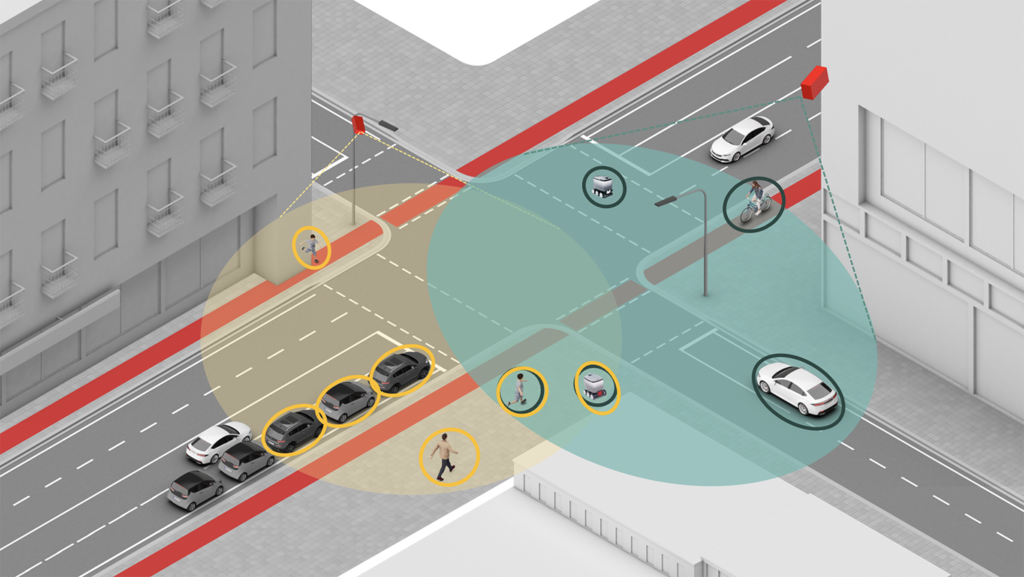
The purpose of this project is to practically explore both human and technical requirements and constraints associated with the future provision of autonomous delivery services. These are provided considering both in-vehicle sensors and via different types of 5G-connected external sensors, creating novel digital-twin data to support the autonomous driving operations. An additional core aspect of the project is represented by an exploration of the human dimension, specifically the coexistence of humans and robots in sidewalks and bike lanes.
Expected effects and results
In this project we will re-purpose the sensing and AI technology developed by Viscando and Veoneer, leveraging their sensors’ information in real time, through low-latency 5G connections, to enhance the perception of various Autonomous Vehicles (AVs) in the area. These, use information obtained by a local “Digital Twin”. An important dimension of this project is also the establishment of the world-first connected sensor infrastructure for AVs, co-located with Ericsson’s Kista Automotive Trial Site.
Structure and implementation
Focus of the project is on capturing the human dimensions and implications associated with these future service offerings. In particular, collecting and analyzing ESs’ data will allow us to understand whether humans change their walking, riding or driving behaviors when facing delivery robots. Important is also the establishment of the world-first connected sensor infrastructure for AVs, Open the sensor infrastructure to other DriveSweden projects
Final presentation
Time period
October 2021-September 2022
Contact
Stig Persson, Ericsson
stig.persson@ericsson.com
Partners
Ericsson, Veoneer, Viscando
Vinnova number
2021-04054